Developing system equations is the important first step for finding solution of a physical mechanical system. Here, I will discuss the procedure for creating the system equations to model a Single Input Single Output (SISO) mechanical system.
Example: Find out the displacement [x (t)] with respect to time for the mass m for the damped mass spring system shown below:
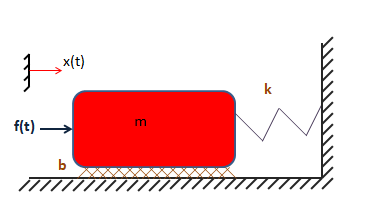
f (t) -Input time dependent force
x (t) – Output time dependent displacement
m – Mass of the body
b – Co-efficient of viscous friction (i.e., friction force per unit velocity, S.I unit N-s/m)
Solution: Although the ultimate objective of the above problem is to find out the displacement x(t) by applied mathematical modeling of the above physical mechanical system, however in this part we will limit our solution only up to the formation of system equations. Let’s see how it is done:
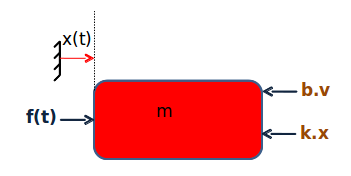
Step – 1 – Draw Free Body Diagram (FBD):
- The D’Alembert’s law, which says that: algebraic sum of all the internal and external forces applied to a body in any particular direction is equals to zero, is used while creating system equations for a mechanical system.
- Consider the direction towards right is positive for any entity.
- Find out all the forces with direction applied to the body. For the system shown in Fig.1 the applied forces are as below:
-
Applied external force +f(t).
-
Reaction force from the spring -k.x(t) or -k.x, as the spring reaction force applied from left to right, so the direction here is negative.
-
Friction force -b.v(t) or -b.v, friction applies to the direction opposite to the motion i.e., left to right hence negative.
-
Considering all the applied forces, the free body diagram for the system shown in Fig.1 looks as below:
Step – 2 – Create System Equations:
Now to get the system equations, D’Alembert’s will be used as follow:
Σ F = 0 (summation of all the forces =0)
=>+f(t) -b.v(t) -k.x(t) =0
=> m.a(t) -b.v(t) -k.x(t) =0 (as, force= mass . Acceleration)
=> m. (d2x / dt2) – b. (dx / dt) – k. x = 0 ( as, d2x / dt2 = a & dx/dt = v)
=> m. x” – b. x’ – k. x = 0 ( as, x”= d2x / dt2 & x’= dx/dt)
So, the system equation for the damped mass spring system shown in Fig.1 finally become:
m. x” – b. x’ – k. x = 0
